[2017] Impedance control design for on-orbit docking using an analytical and experimental approach
Abstract
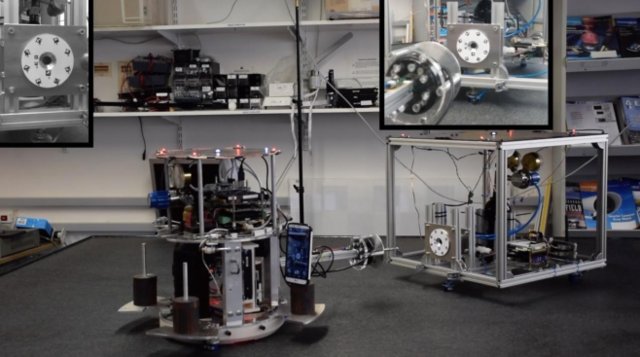
An important phase in On-Orbit servicing missions is robotic docking. Successful docking is subject to a number of parameters and conditions. In this work, the robotic impact docking between two space systems is considered. The docking of a robotic Chaser to a Target spacecraft is modeled using a multibody approach. The impedance properties required for an impedance controller that will ensure adequate probe-drogue contact time for docking are computed and are related with their mechanical counterparts. This time is derived analytically employing a mechanical equivalent system, and validated experimentally on a planar zero gravity emulator facility, allowing the selection of impedance parameters for successful docking.
Zisos Mitros, PhD
Mechatronics Development Engineer
Zisos’ research interests include robotics, mechanical design and modelling and control.