Abstract
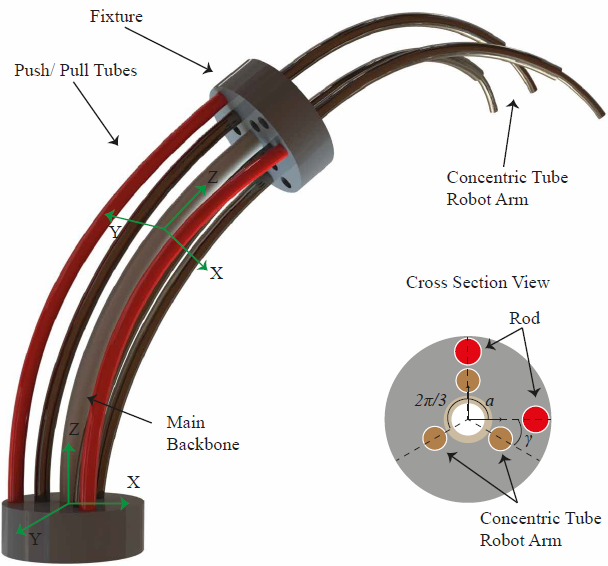
Continuum surgical robots can navigate anatom-ical pathways to reach pathological locations deep inside thehuman body. Their flexibility, however, generally comes withreduced dexterity at their tip and limited workspace. Buildingon recent work on eccentric tube robots, this paper proposes anew continuum robot architecture that combines the flexibilityof push/pull actuated snake robots and the dexterity offeredby concentric tube robotic end-effectors. We designed andpresent a prototype system as a proof-of-concept, and developeda tailored quasistatic mechanics-based model that describesthe shape and end-effector’s pose for this new type roboticarchitecture. The model can accommodate an arbitrary numberof arms placed eccentrically with respect to the backbone’sneutral axis. Our experiments show that the error betweenmodel and experiment is on average3.61%of the manipulator’soverall length. This is in agreement with state of the art modelsof single type continuum architecture
Zisos Mitros, PhD
Mechatronics Development Engineer
Zisos’ research interests include robotics, mechanical design and modelling and control.