About Me
I’m a Mechanical Engineer with a PhD in Robotics from UCL, where I focused on surgical robotics. I bring over 8 years of experience in mechanical design, robotics, and systems integration, with a strong track record in developing advanced mechatronic systems from concept through to implementation. My background spans high-tech sectors including semiconductors, aerospace, medical devices, and academia.
Currently, I work as a System Engineer/ System Architect at ZEISS SMT in Switzerland, where I develop high-precision systems for the semiconductor industry. My work spans system architecture, mathematical modeling, and cross-functional integration across mechanical, electrical, and software domains. I also work on requirements engineering, technical documentation, and technical project management.
Interests
- Robotics
- System Engineering/ System Architecture
Education
PhD in Robotics, 2022
University College London, UK
MPhil in Biomedical Engineering, 2018
University College London, UK
MEng in Mechanical Engineering, 2016
National Technical University of Athens, Greece


![[2021] Gripe-Needle: A Sticky Suction Cup Gripper Equipped Needle for Targeted Therapeutics Delivery](/publication/frontiers_2021_2/featured_hu8101c9f5534900a1bd030199b8e795de_245229_150x0_resize_lanczos_2.PNG)
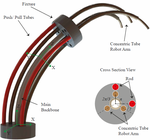
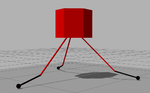
![[2021] Design and Quasistatic Modelling of Hybrid Continuum Multi-Arm Robots](/publication/icra_2022/featured_hu5274ccd43467c09fa3b22153d228dce1_222002_150x0_resize_lanczos_2.PNG)
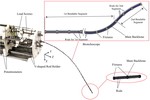
![[2021] From Theoretical Work to Clinical Translation: Progress in Concentric Tube Robots](/publication/annual_2021/featured_hu649c58c13e17bf224ca6f87fcdda4333_30157_150x0_resize_lanczos_2.PNG)
![[2021] Design & Engineering of Hybrid Continuum Multi Arm Robot](/publication/mesrob_2021/featured_hu8a3c94fd50a4f63089a90ff976c78f6b_1383049_150x0_resize_lanczos_2.PNG)
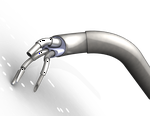
![[2021] Autonomous Steering of Concentric Tube Robots via Nonlinear Model Predictive Control](/publication/frontiers_2021/featured_hu13d161404074ff80fe91d18603e70538_185705_150x0_resize_q90_lanczos.jpg)